Mobile Robots – lab4
Introduction
The goal of the assignment is to use features (lines) to
determine pose of the robot.
Note – the task uses lines detected by the feature
extraction from the previous assignment.
Preparation
Before class, you should read the description of the task and auxiliary materials in the following scope:
- recall formulas to calculate point to line distance and
the point of line crossing;
- recall the formulas of coordinate transformations between shifted and rotated coordinate systems relative to each other;
Line based localization – data files
- Use data
from
line_localization_1.json file and
the code from the previous laboratory to calculate lines.
- Define a global coordinate system (world frame).
- Determine position of the robot in the world frame.
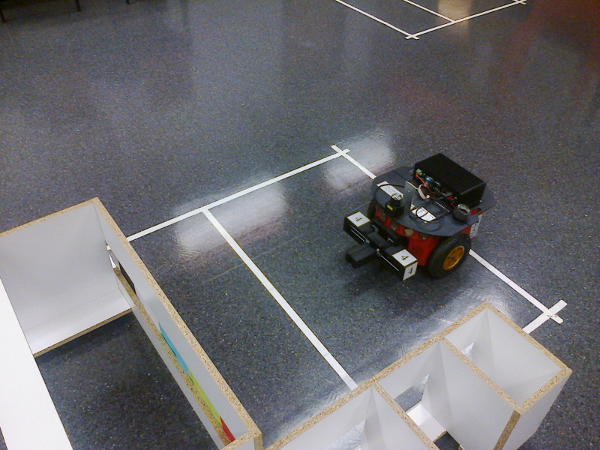
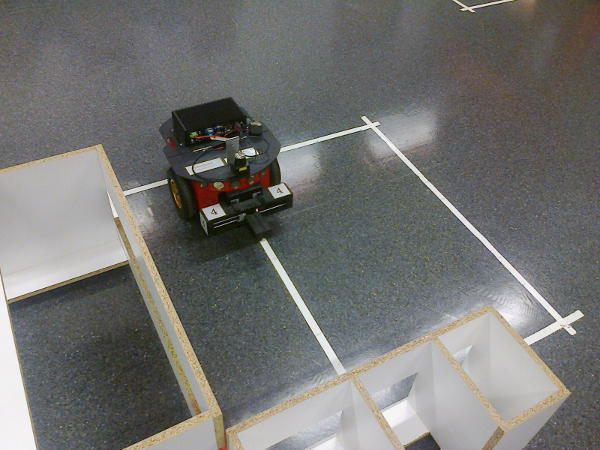
- Visually evaluate the localization results comparing calculated poses to the images below.
- Determine the orientation of the robot in the world frame.
- Assume that in the first step odometric (pose data in odom frame) and feature based localizations match and calculate the transformation between odom and world frames.
- Calculate the error between the two methods in the following steps.
Note: To simplify the task, you can limit the range of scanned data from the scanner by narrowing the observed angle and limiting the maximum distance.
Live experiments (optional)
- Plan and perform experiments with a robot
- Analyze the results.
Additional information
line_localization_1



Report
The report should be sent by email in pdf format and should contain:
- Brief description of the applied method.
- Results of localization for selected scenarios.
- Evaluation of the errors: visual and calculated
- (Optionally) Results from the live experiments with robots.
-
Observations and conclusions
Sample code