R2. Kinematics
Table of Contents
1 Info
The assignment presents properties of serial robot kinematics and Denavit-Hartenberg notation.
The points marked with (*) are optional (not obligatory).
2 Preparation
Before the classes recall from the lecture definitions of robot kinematics and Denavit-Hartenberg notations. Prepare the formulas to calculate the kinematics from D-H parameters. Consider which functions from the toolbox will be needed to solve the current tasks.
3 Tasks
Task 0: Complete unfinished tasks from the previous assignment
Task 1: Kinematics of a 3R robot
- Find homogenous transformations for an RRR robot:
Assume the link lengths are, respectively, 2, 1 and 1.
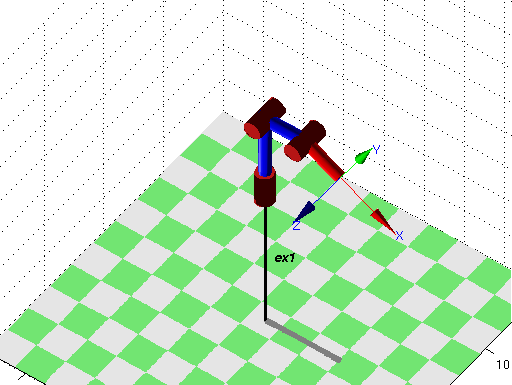
- For selected joint angles plot coordinate systems associated with each joint.
- Assume q1=q2=q3=0. What are expected positions and orientations of coordinate systems? What is expected translation vector in robot kinematics? What is expected rotation?
- Calculate the kinematics for the joint values from the previous item. Is the result the same as expected?
- For the same joint angles calculate Euler angles from kinematics transformation. Check the result with the expected value.
- To report:
- Write homogenous transformations for each joint and kinematics for the joint angles q1=0, q2=π/4, q3=-π/6. Include Matlab code used to obtain these matrices.
2. Find the joint angles for which the translation vector of the kinematics is [0,1,3].
Task 2: SerialLink manipulator
- Define an RT robot using toolbox functions. Verify its D-H parameters.
>> import ETS3.*
>> rob=SerialLink([Revolute('d',1,'alpha',pi/4) Prismatic('a',1)])
>> rob.name='RT'
- Calculate kinematics for given joint angle and translation and plot the result
>> rob.fkine([pi/4 1])
- To report:
- Use toolbox function to define the robot from task 1.
- Include code.
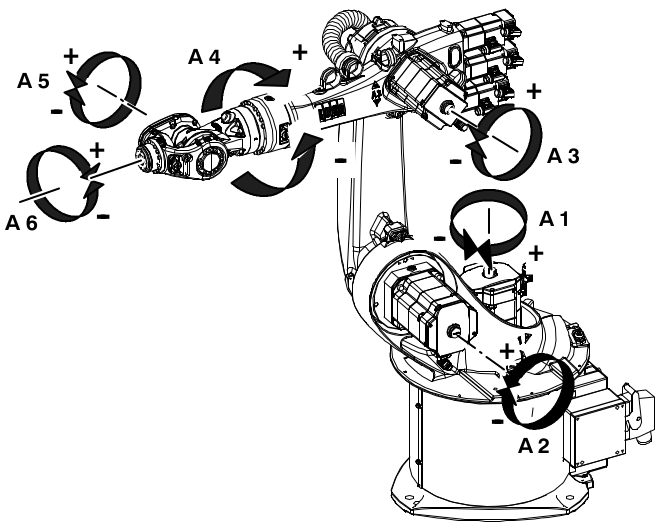
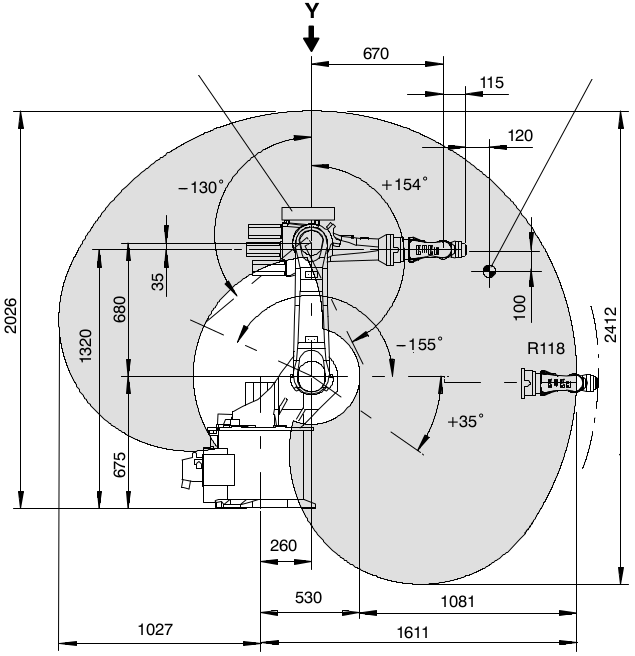
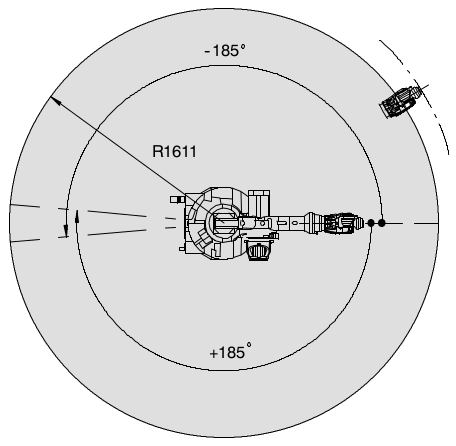
Task 3*: Kinematics of an industrial robot
- Find D-H parameters for the Kuka KR16 industrial robot presented below.
- Calculate kinematics for selected joint angle values.
- To report:
- Include a matrix of D-H parameters
- Include a vector of joint angles and kinematic matrix calculated for it.
4 Summary
- The report should include the result of the tasks and answers to the questions.
- Please do not forget to indicate the author of the report!
- The report in PDF format should be submitted before the beginning of next classes using a method defined by the instructor.